









































近日,5G R16标准宣布冻结,这也标志着5G标准已经确定,这也是第一个5G-V2X标准 ,其中支持了V2V (车与车)和V2I (车与路边单元)直连通信,将加速5G发展步伐。每一个标准版本的诞生,就意味着一波新的行业机会来临。
车联网利好
5G车联网虽然目前尚不成熟,但R16的发布将对车联网(V2X)做出重要增强,也就是说,网络层面对于V2X支持的障碍即将彻底扫除。
无人驾驶是智慧交通发展的终极目标,车路协同是智慧交通系统发展的最新方向,新发展起来的C-V2X逐渐受到更多的关注,有望成为国内车联网建设部署主要方式。
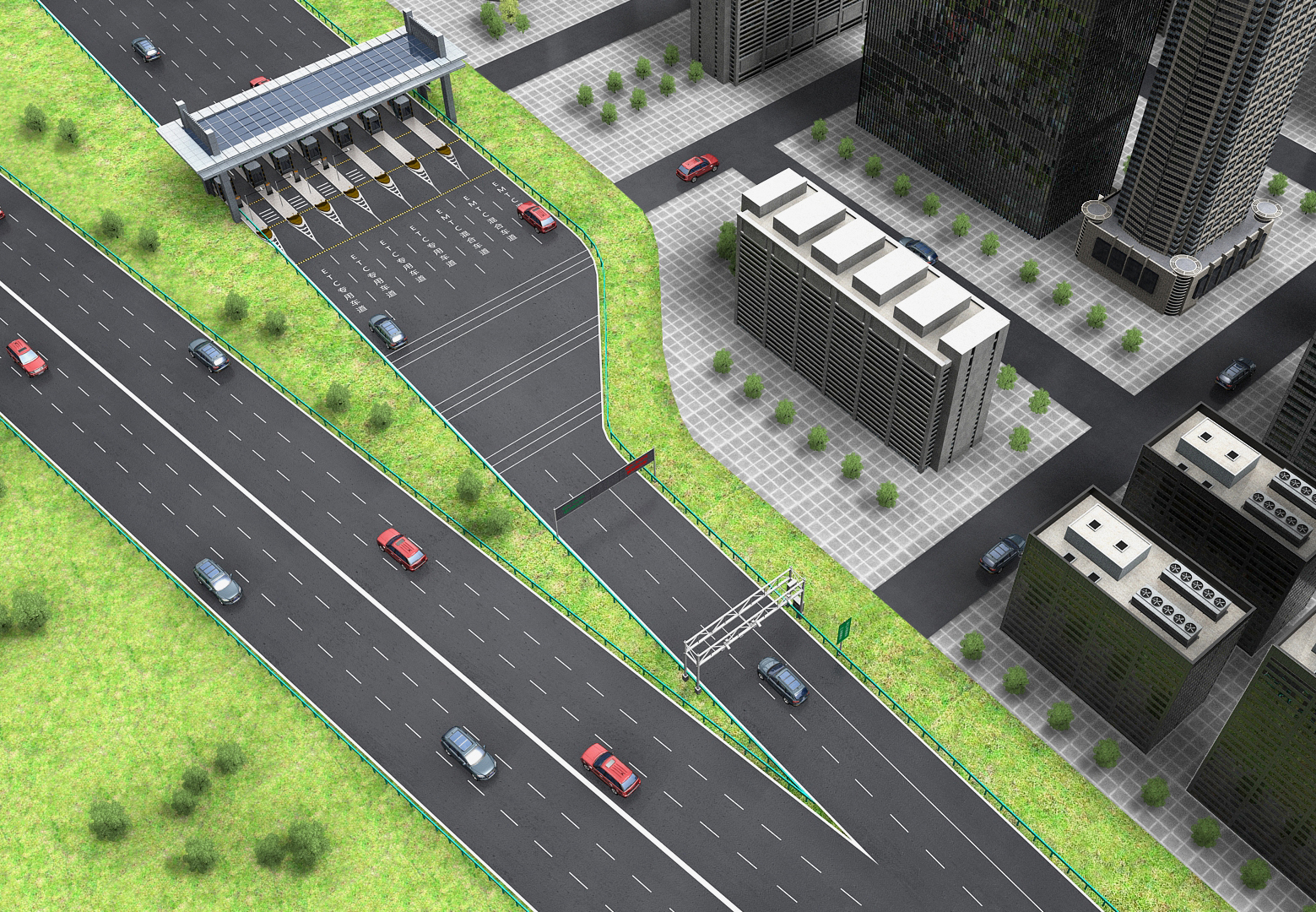
车联网是智慧交通落地主要抓手,业务场景应用广阔要使汽车具有对外通讯能力,车联网应运而生。车联网可以实现车与人/车/路/服务平台的全方位网络连接,应用场景主要分为安全类、信息类和交通效率类。
信息类的应用场景主要包括紧急呼叫业务等提高车主驾车体验的应用;交通效率类的应用场景包含红绿灯车速引导、交通事故提醒、潮汐车道提醒、交通拥堵提醒、 限速提醒、紧急车辆通行提醒等应用;安全类的应用主要有人车避撞提醒、电单车出没提醒、紧急制动提醒、交叉路口避撞提醒、前向碰撞预警等。可以说,有了车联网,出行会更加智能,车联网将优先打开 5G 行业应用市场空间。
什么是C-V2X?
目前我们所指的V2X都是C-V2X,也就是Cellular-V2X,Cellular是蜂窝网络的意思,这里的蜂窝网络就是指咱们4、5G网络使用的移动通信方式,所以C-V2X就是使用移动通信网络实现的V2X,目前V2X几乎都是C-V2X。
V2V(车-车)可以用做车辆间信息交互和提醒,典型应用是用于车辆间防碰撞安全系统。
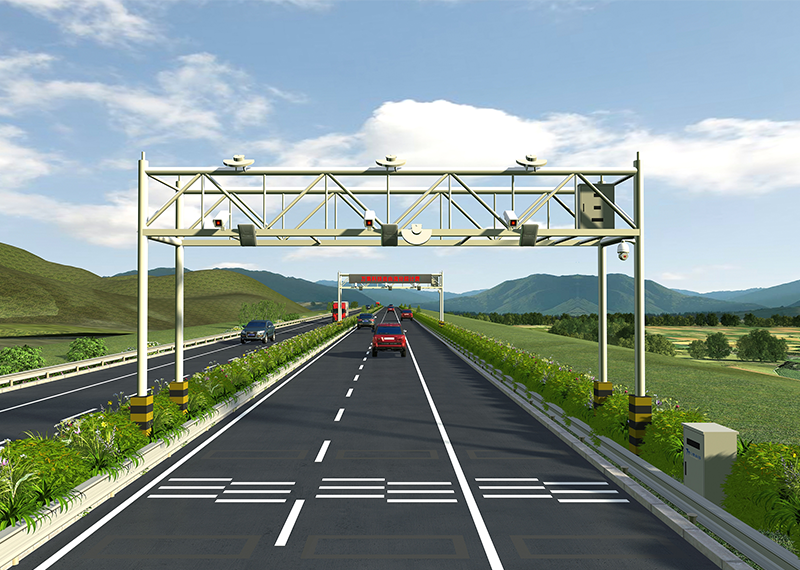
V2I(车-基础设施),车辆可以与道路甚至其他基础设施,例如交通灯、路障等通信,获取交通灯信号等道路管理信息。
V2N(车-互联网)是目前应用最广泛的车联网形式,其主要功能是使车辆通过移动网络,连接到云服务器,使用云服务器提供的导航、娱乐、防盗等应用功能。
V2P(车-行人)是用做给道路上行人或非机动车安全警告。
C-V2X技术正持续获得广泛的生态系统支持,有望成为汽车安全与未来自动驾驶领域的重要技术。
简单来说,C-V2X就是一项能够帮助人类或者车载电脑看到更远地方的通讯技术。在全时空动态交通信息采集与融合的基础上开展车辆主动安全控制和道路协同管理,充分实现人车路的有效协同。
产业各方抢夺制高点
虽然当前5G在2B场景上并没有找到太好的应用场景,但是车联网这个刚需目前已经逐渐的浮出水面了。5G的商业化应用,让国内一直以来坚持的C-V2X路线在延时性上的优势得以充分发挥,应用前景和可行性大幅提高。
产业各方正在积极布局,重点争夺新兴市场,先设备再平台的投资主线。
随着 C-V2X 的部署落地,首先将带来芯片、模组、终端设备等硬件层面的海量需求;随着基础设施工作建设完成之后,平台运营有望衍生更大价值。
科技公司借助 AI 技术, 提供自动驾驶解决方案;互联网借助内容服务与AI,渗透自动驾驶出行服务; 运营商依托蜂窝网,为网联式自动驾驶提供服务;位置服务公司基于已有的地图业务,布局高精度地图服务。
车载终端在不同的环境或者状态下,各个链路的状况也会有所不同。例如,在无覆盖的场景下,车载终端只能通过侧行链路进行通信
R16系统研究了在不同的网络环境下、不同的场景下以及不同的通信需求下,如何选择合适的通信链路,从而保证V2X通信的质量;此外,也考虑了不同类型车载终端的能力的不同,例如部分车载终端只支持LTE V2X或者部分车载终端支持NR V2X。
车联网不单单是为了实现自动驾驶,5G甚至未来的6G网络,并不能实现自动驾驶,自动驾驶一定是要依靠汽车自身强大的传感器、雷达和摄像头来实现的。
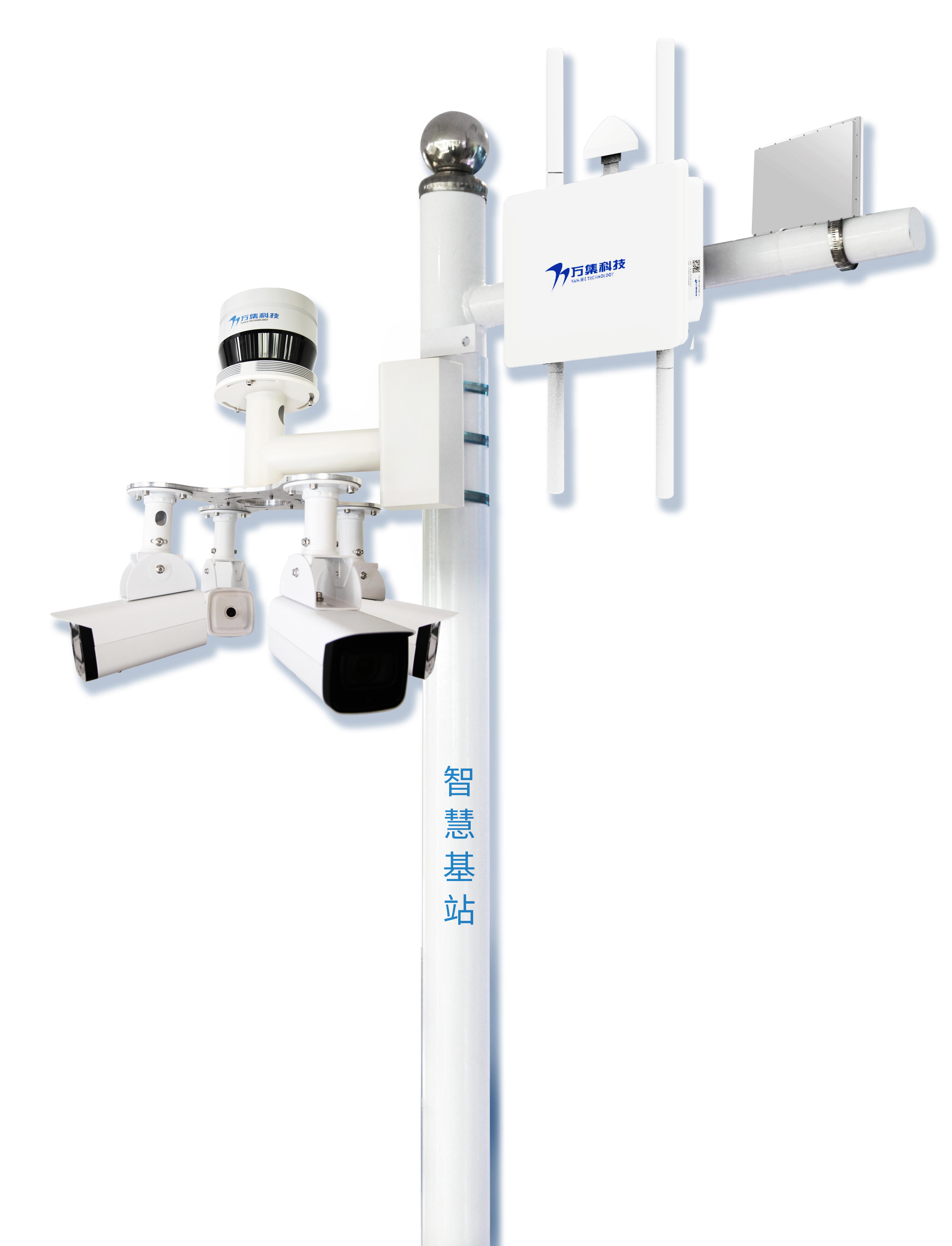
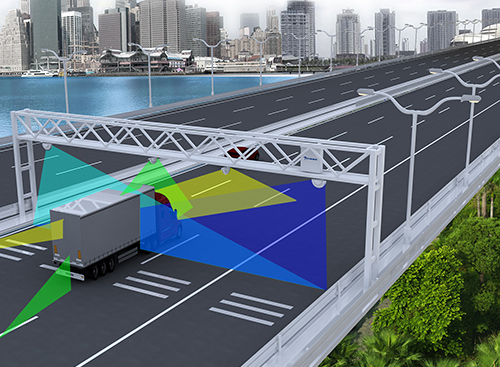
自动驾驶三大关键设备
一是激光雷达。激光雷达是自动驾驶汽车最重要的一双眼睛,其作用是通过向汽车周围发射激光,进而测量激光在周围环境中充分反射、折射后返回的光束,来确定周围物体的距离、速度与方位。
二是毫米波雷达。毫米波雷达与激光雷达工作方式相近,但相比于激光雷达,毫米波雷达不容易受天气影响,在激光雷达因大雪、雾霾无法准确判断周围环境时,可以作为辅助探测手段,且毫米波雷达测距更远。但是毫米波雷达分辨率低,无法做精确环境评估,因此只能作为激光雷达的辅助,类似于眼睛上的眼镜。
三是摄像头。通过摄像头的图像识别,可以辅助实现车道判断、交通标识识别、交通信号灯识别等雷达无法实现的功能,辅助实现真正完整的自动驾驶系统。
通过V2X,可以帮助汽车实现辅助自动驾驶、车载娱乐、自动路线规划、远程防盗、远程报修等各类功能。
通信技术是自动驾驶核心要素之一,车联网和自动驾驶都需要厘米级精确定位,确保安全的路径规划和稳定流畅的执行指令,4G偶尔出现的信号不稳定或延迟,对汽车安全存在巨大隐患。
伴随5G时代到来,其将为车联网技术、自动驾驶带来更多加速和突破,甚至给整个产业打开更多想象的空间。

