

































2023年5月15日-18日,中国(亦庄)智能网联汽车科技周|第十届国际智能网联汽车技术年会(CICV 2023)在北京盛大开幕,旨在全面推进中国智能网联汽车建设,万集科技总工程师朱弘戈、智能网联总工程师周浩受邀参与活动。万集科技作为国内领先的V2X产品和解决方案提供商,凭借过去一年在智能网联汽车领域的突出贡献,荣获中国智能网联汽车产业创新联盟2022年度优秀会员单位。

朱弘戈在“C-V2X智能网联创新应用与实践”专题研讨会中以“路基自动驾驶技术创新与应用探索”为题发表演讲,分享万集科技在自动驾驶车路协同技术领域的最新实践与前沿思考。
伴随汽车的网联化、自动化程度逐步提升,技术演进分化为不同路线共存态势,多维混合交通流是历史发展的必由之路。不同智能等级车辆长期共存构成混合交通环境,削弱了自动驾驶带来的交通通行效率及安全性提升。为使自动驾驶运行尽快达到安全稳定理想状态,朱弘戈提出路基自动驾驶理念,通过道路基础设施智能化发展进一步丰富自动驾驶内涵,并实现不同业务场景下的自动驾驶,随后他从感知、决策和信息发布等方面介绍了路基自动驾驶技术的发展创新。

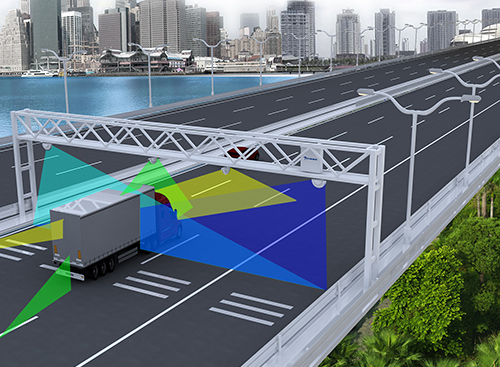
在感知方面,车侧和路侧各自具有明显局限性,车路协同可以实现车路感知互补,形成综合感知能力。如在紧邻换道场景下,车侧感知微观运动、紧邻车辆运动状态,但宏观感知不足;路侧感知交通流运行状态、区域车辆微观运动行为,但车辆微观行为感知不足。车路协同下的车辆与道路的互补感知体系具有独立感知局限性与协同感知互补性。
在决策方面,随着MEC和通信技术的发展,路侧决策相关研究和开发工作逐步聚焦在路段和节点。比如万集科技针对碰撞预警区、换道引导区和速度协调区,实现了增加区域内车头空距、清空应急通道等基于边缘节点侧的低时延管控措施决策。

针对不同等级自动驾驶车辆在时间空间隔离探索方面,朱弘戈深入介绍了自动驾驶专用车道柔性管控技术,并提出“任何一辆车都要能开到不同智能水平的道路上,任何一条路都要能服务于不同智能水平的车辆”这一创新理念。

万集科技智能网联总工程师周浩参加主题为“云控基础平台的规模化应用”的圆桌会议,与参会嘉宾对云控基础平台大规模应用的前景、挑战与应对策略进行了互动交流。
当前,国内智能网联汽车发展迎来新机遇,万集科技将持续推进车路协同、自动驾驶技术创新应用与实践,夯实数据信息互联互通基础,助力智能交通发展。

